/*
* Arduino framework
*/
#include <arduino.h>
/*
* MOZ IoT
*/
#include <Thing.h>
#include <WebThingAdapter.h>
/*
* Graphics
*/
#include "TFT_eSPI.h" // Hardware-specific library
TFT_eSPI display = TFT_eSPI();
WebThingAdapter* adapter;
const char* sensorTypes[] = {"LevelSensor", nullptr};
ThingDevice hcsr04("HC-SR04", "HC-SR04", sensorTypes);
ThingProperty distance("distance", "Distance in cm", NUMBER, "LevelProperty", "Distance", "in", "false");
ThingPropertyValue measurement;
/*
* WiFi ssid and password
*/
const char* ssid = ".........";
const char* password = "........";
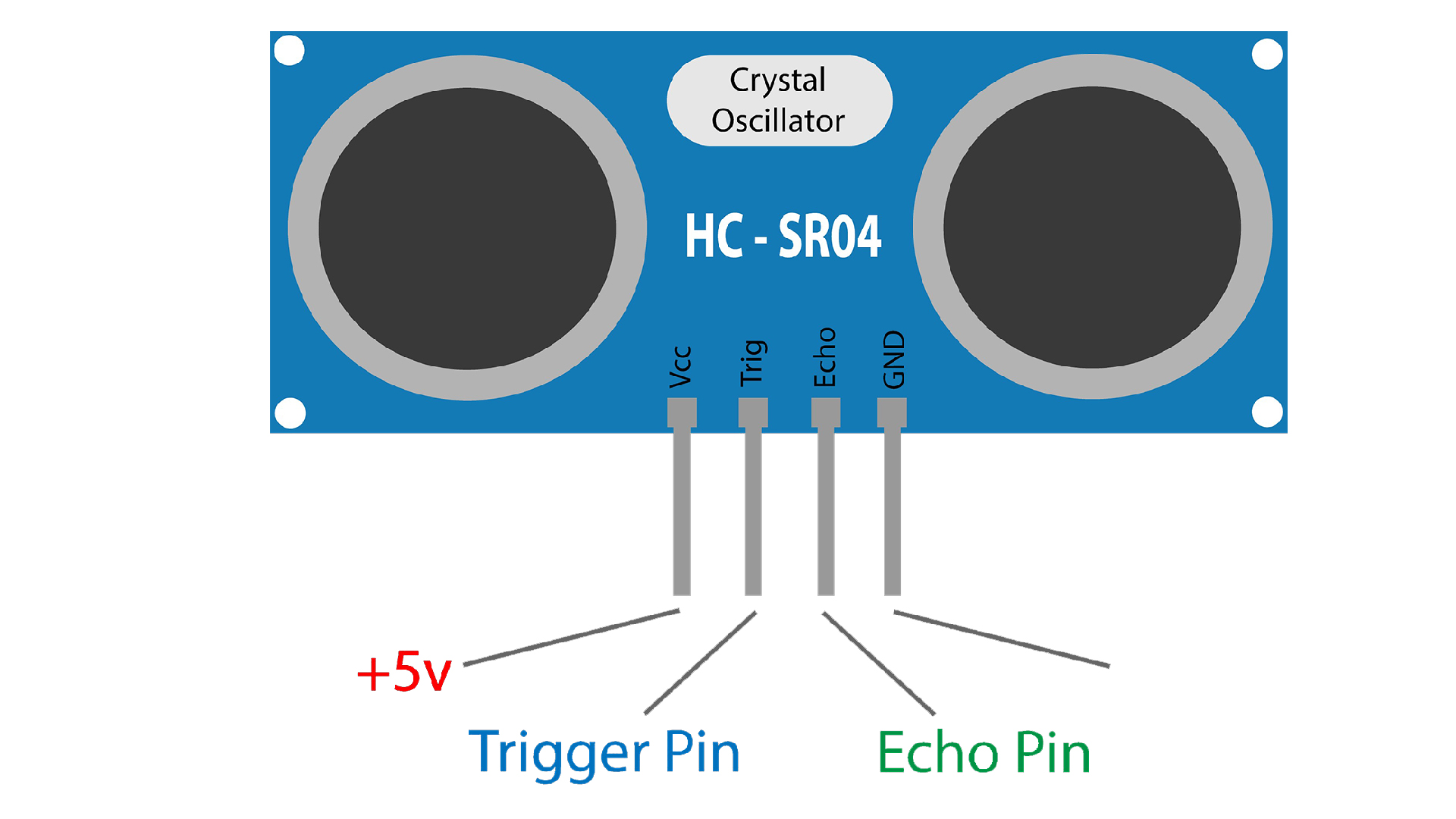
/*
* HC-SR04
*/
int trigPin = 2; // Trigger
int echoPin = 4; // Echo
long duration, cm, inches;
/*
* displayString helper function to draw text on
* the TFT display
*/
const int textHeight = 18;
const int textWidth = 18;
const int width = 320;
const int height = 240;
String last, current; // current and last values of text
void displayString(const String& str, int color) {
int len = str.length()+1;
int strWidth = len * textWidth;
int strHeight = textHeight;
int scale = width / strWidth;
int x = width / 2 - (strWidth * scale / 2);
int y = height / 2 + (strHeight * scale / 2);
display.setFreeFont(&FreeSans18pt7b);
display.setRotation(1);
display.setTextColor(color);
display.setTextSize(scale);
display.setCursor(x, y);
display.println(str);
Serial.println(str);
}
/*
* First-time initialization
*/
void setup() {
// Start serial monitor - make sure same speed as monitor
Serial.begin (115200);
// HC-SR04 pins
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// Turn on display
pinMode(33, OUTPUT); // turn on the IoT-Bus Display
digitalWrite(33, HIGH);
// Start display and clear
display.begin();
display.fillScreen(ILI9341_BLACK);
// Start WiFi
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("");
// Wait for connection
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("");
Serial.print("Connected to ");
Serial.println(ssid);
Serial.print("IP address: ");
Serial.println(WiFi.localIP());
// Initialize MOZ IoT thing
adapter = new WebThingAdapter("textdisplayer", WiFi.localIP());
measurement.number = -1;
distance.setValue(measurement);
hcsr04.addProperty(&distance);
adapter->addDevice(&hcsr04);
adapter->begin();
}
void loop() {
// The sensor is triggered by a HIGH pulse of 10 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the signal from the sensor: a HIGH pulse whose
// duration is the time (in microseconds) from the sending
// of the ping to the reception of its echo off of an object.
pinMode(echoPin, INPUT);
duration = pulseIn(echoPin, HIGH);
// Convert the time into a distance
cm = (duration/2) / 29.1; // Divide by 29.1 or multiply by 0.0343
inches = (duration/2) / 74; // Divide by 74 or multiply by 0.0135
// Uncomment to display on serial monitor
// Serial.print(inches);
// Serial.print("in, ");
// Serial.print(cm);
// Serial.print("cm");
// Serial.println();
if(cm >= 400 || cm < 2){
current = "Out of range";
}
else{
current = String(inches) + " in";
}
if (current != last){
displayString(last, ILI9341_BLACK); // clear old text by writing it black
displayString(current, ILI9341_WHITE); // write the new value
measurement.number = inches;
distance.setValue(measurement);
adapter->update(); // update the MOZ IoT thing
last = current; // remember the last write to be able to clear it
delay(500); // vary to suit
}
}